Un grupo de científicos de la Universidad de Pensilvania desarrolló un sistema llamado Dreureka diseñado para entrenar robots utilizando grandes modelos de lenguaje de inteligencia artificial como OpenAI GPT-4. Como se entiende, este es un método más efectivo que una serie de tareas en el mundo real.
La plataforma Dreureka (Eureka) demostró su funcionalidad utilizando el ejemplo de Robot Unitree Go1, una máquina de cuatro deseos con software de código abierto. Implica el entrenamiento de un robot en un entorno simulado mediante el uso de la selección aleatoria de variables básicas como fricción, masa, amortiguación, centro de gravedad y otros parámetros. La inteligencia artificial creó una recompensa y un código que explica el sistema penal para capacitar al robot en un entorno virtual basado en varias solicitudes de usuarios. Al final de cada simulación, la inteligencia artificial analiza qué tan bien el robot virtual hace frente a la siguiente tarea y cómo mejorar el rendimiento. El hecho de que la red nerviosa pueda crear rápidamente escenarios en grandes volúmenes y comenzar su ejecución simultánea facilita el proceso.
La inteligencia artificial constituye tareas con valores de parámetros máximos y mínimos en los puntos donde el mecanismo no funciona mal o se rompe; Accionar o superar esto requiere la disminución en la finalización del escenario de capacitación. Los programadores del estudio causan instrucciones de seguridad adicionales necesarias para escribir correctamente el código de IA, de lo contrario, la red nerviosa comienza a "engañar a Olarak durante la simulación para lograr el máximo rendimiento, y esto hace que los motores se sobrecalienten o dañen el robot en el mundo real. En una de estas escenarios no naturales, el robot virtual" descubrió "que podría moverse más rápido si cerró una de sus piernas y comienza a moverse con tres piernas con tres etapas.
Los investigadores instruyeron al robot capacitado que prestara especial atención a la inteligencia artificial, dado que el robot será probado en el mundo real; Por lo tanto, la red nerviosa, la suavidad de los movimientos, la orientación horizontal y la altura del cuerpo de las funciones de seguridad adicionales se formaron. Teniendo en cuenta la cantidad de torque para motores eléctricos, los valores especificados no deben exceder. Como resultado, el sistema Dreureka logró entrenar el robot mejor que el hombre: la máquina mostró un aumento del 34 por ciento en la velocidad de movimiento y un aumento del 20 por ciento en la tierra resistente. Los investigadores explicaron este resultado con una diferencia en los enfoques. Al aprender un problema, la persona lo divide en varias etapas y encuentra una solución para cada una, el GPT enseña todo al mismo tiempo y está claro que las personas no pueden hacerlo.
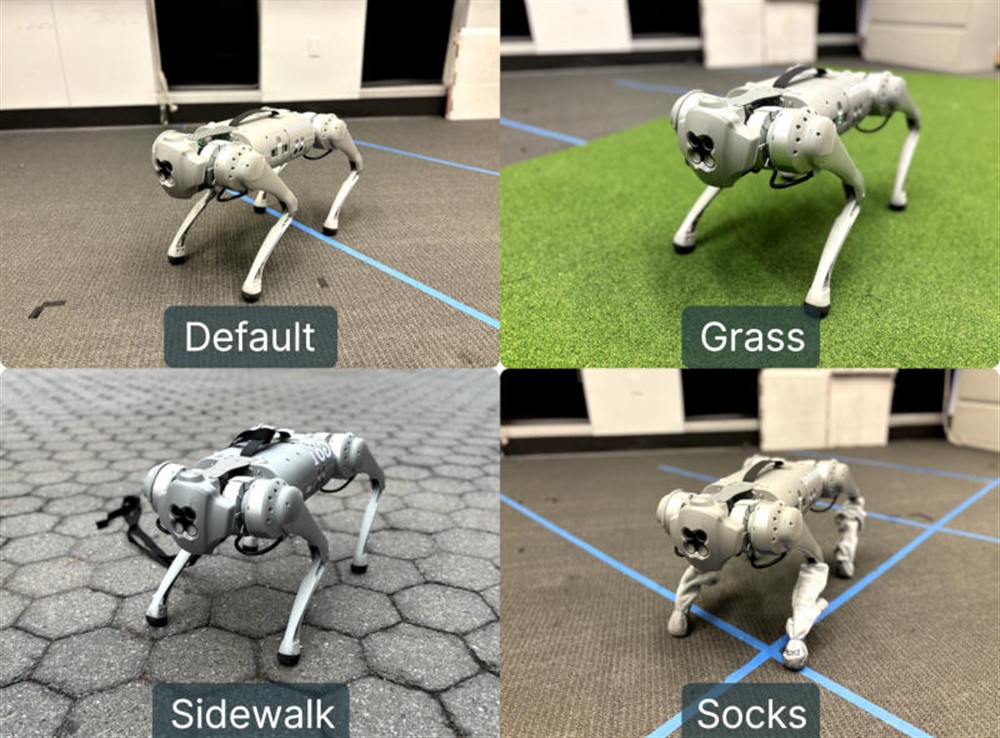
Como resultado, el sistema Dreureka nos permitió pasar directamente de la simulación al mundo real. Los autores del proyecto afirman que si pueden proporcionar comentarios del mundo real a la inteligencia artificial, aumentarán aún más la eficiencia de la plataforma; para esto, la red neuronal tendrá que examinar las grabaciones de video de las pruebas en lugar de limitar las grabaciones de video. Analizar errores en los diarios del sistema del robot. Una persona promedio tarda aproximadamente 1,5 años en aprender a caminar y solo unos pocos pueden montar la pelota de yoga. Entrenado por Dreureka, el robot está superando efectivamente esta tarea.

