宾夕法尼亚大学的一群科学家开发了一种名为Dreureka的系统,旨在使用大型人工智能语言模型(例如OpenAI GPT-4)训练机器人。据了解,这比现实世界中的一系列任务更有效。
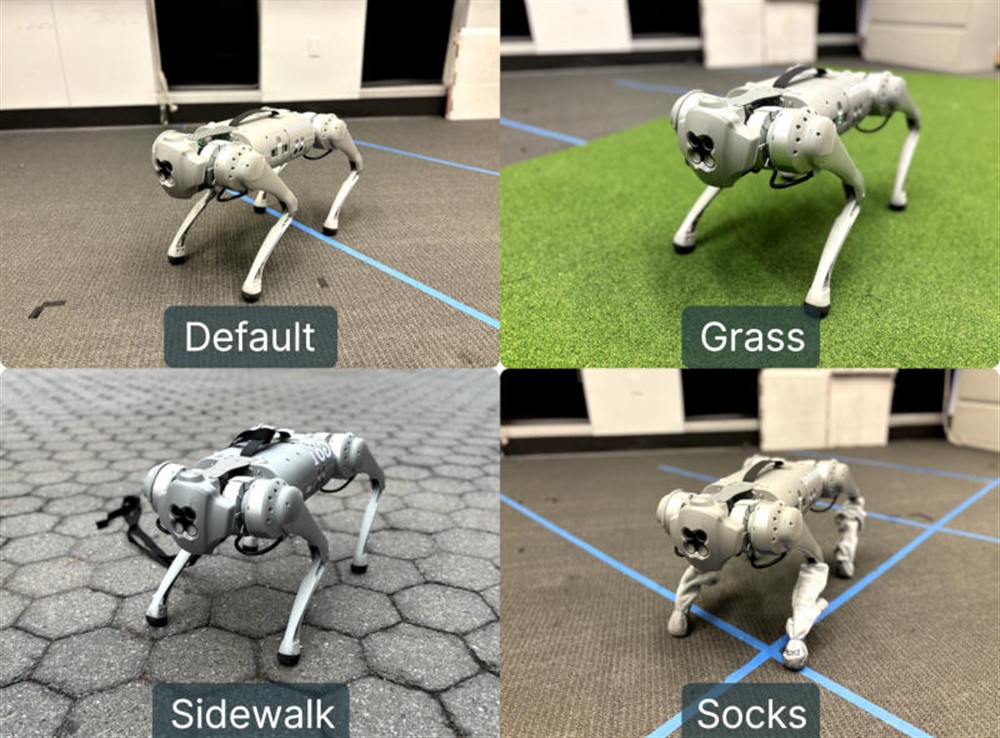
Dreureka(Eureka)平台通过使用Unitree GO1机器人示例,这是一台带有开源软件的四腿机,证明了其功能。它涉及在模拟环境中使用基本变量(例如摩擦,质量,阻尼,重心和其他参数)的训练。人工智能创造了一个奖励和代码,该奖励和代码解释了根据各种用户请求在虚拟环境中训练机器人的犯罪系统。在每个模拟的结尾,人工智能分析了虚拟机器人应对下一个任务以及如何提高性能的能力。神经网络可以快速创建大量场景并同时执行的事实使过程变得更加容易。
人工智能构成在机制出现故障或损坏的点处具有最大和最小参数值的任务;继续或克服这需要减少培训方案的降低。该研究的程序员会导致正确编写AI代码所需的其他安全说明,否则神经网络开始“在模拟过程中作弊以实现最高性能,这会导致引擎过度或损坏现实世界中的机器人。在这些不自然的场景中之一,虚拟机器人在一个不自然的情况下,如果他发现他可以在他的三分之三的腿上移动,这可能会使他更加加快了三分之三的动作,并开始了三分之三的行动。
鉴于机器人将在现实世界中进行测试,研究人员指示训练有素的机器人特别注意人工智能。因此,形成了神经网络,运动的平滑度,水平方向和身体高度的额外安全功能。考虑到电动机的扭矩量,指定值不应超过。结果,Dreureka系统设法比人更好地训练机器人:机器的运动速度增长了34%,在崎land的土地上增加了20%。研究人员解释了这一结果,方法的差异。当学习一个问题时,该人将其分为几个阶段,并为每个问题找到解决方案,GPT同时教授所有内容,很明显人们无法做到这一点。
结果,Dreureka系统使我们能够直接从模拟转移到现实世界。该项目的作者声称,如果他们可以提供现实世界中的反馈到人工智能,他们将进一步提高平台的效率 - 为此,神经网络将不得不检查测试的录像,而不是限制视频录制。分析机器人系统日记中的错误。一个普通人大约需要1。5年才能学会走路,只有少数人可以骑瑜伽球。由Dreureka培训,机器人有效地克服了这项任务。

